那些年我們一起看過的漫畫

2024年3月8日 新聞傳來日本的漫畫家鳥山明先生已經離開這個世界,對於我們這個年紀出生的“年青人”,應該大家也會覺得很可惜,我們從小看着鳥山明先生的漫畫長大,腦中立刻回想起過去的一段青春歲月,原來轉眼已經是幾十個年頭了,一星期過去了,心情也久久不能平復,還記得十來歲的時候已經開始模仿鳥山明先生的作品,開始繪畫着兒時那個可愛的孫悟空,一路模仿着對繪畫以及設計產生興趣了。
198x 年到 1990 年代初,正版的漫畫還沒有出現,那時候最開心的事情,就是等到每星期六買到的”漫畫周刊”,看着那些原來沒有買到版權的漫畫雜誌,後來直至到 90年代中左右才出現已授權的正版,還記得我的第一本漫畫單行本就是龍珠的25期了。
中學時期每次上課,那些沒有興趣的課堂,我的書本內,必然在空白的地方也會偷偷的畫上「龍珠」,雖然那些課本全部已經不在了,但是腦海裏面仍然記得,在空白地方畫上的悟空、悟飯、魔童。
對於從漫畫上找到繪畫興趣的我,最喜歡的就是在美術堂了,以及當時的金工堂。可能這就是因為當時慢慢吸收到的設計技巧了。

到後來出來工作,「龍珠」也完結了。對於看漫畫的熱情也減退了很多,出來做事工作也開始繁忙了,成熟了。變成成年人了,但是收到 鳥山明先生離世的消息,始終也有一點可惜,原來匆匆的,就是幾十年了。
「龍珠」看似是一套王道的格鬥漫畫、冒險故事。但是我有另一番體會。鳥山明先生把很多人生的道理暗藏在漫畫內,人的成長是需要不停的經過磨練 / 考試 / 訓練 以及人生際遇,才可以慢慢變成熟。如果 當天悟空 沒有遇到 莊子,那麼他的人生可能就有不同了。如果他沒有遇到龜仙人,也將會是另一個故事。如果他沒有遇到龜仙人也不會得到正式的武術訓練,如果他沒有得到正式的武術訓練,也不會參加天下第一武道大會了。整個故事也不同了。當然這只是故事,人生並沒有如果,但是這就是很簡單的道理。
主角悟空有很多師父,龜仙人、貓仙人、天神、界王,從眾多的師父身上學習,又會學到對手的招式,舞空術、太陽拳,這些就是我們生活上學習的道理吧。
學習也有分有沒有經過深思熟慮,如果悟空和悟飯進入精神時光屋的時候,像比達和杜拉格斯那樣不斷把力量提升,而不是採取力量的平衡,相信又會是另外一個結果。
如果當初我沒有遇到這套漫畫,沒有鳥山明老師的這套漫畫,相信我的人生也會是不一樣?
雖然現在不太會畫漫畫了,但是技巧依然是存在的,最後趁着鳥山明先生離世這個消息,做好這一張雷射雕刻的木板畫,向鳥山明先生致敬。
木板畫是用鳥山明先生從前的稿件,放入雷射雕刻機,雕刻出外型以及深淺度,再在上面油上水彩以及勾白製成的。

雖然鳥山明先生已經離開了,但是從漫畫裏看得出他對生死有另外一種看法,從最初占星婆婆帶悟空的爺爺悟飯回到人界和悟空見面,到後來悟空走完蛇道見到界王,再回到人界,以及再後來出現的人造人20號(蓋落博士),以及最後的魔人布歐的轉世歐布,相信也是鳥山明先生對於生死的看法。
另外一種見解,「龍珠」裏面其實也有隱藏着一些科技元素,例如紅巾軍後來再次出現的人造人,16號 是一個純粹的機械人,17號 和 18號 是由人改造的人造人,19號 是一個純粹的機械人,20號 是蓋落博士改做自己的人做人,斯路 是經由細胞培植 及由 電腦自行運算,而生產出的人造人,對比起現在的科技,其實30年前 鳥山明先生 已經把這些元素暗藏在故事裏面,「純粹的機械人」、「把一些電子零件插入到人體裏面的人造人」、「把大腦移植 或者 把思維移植 到機械人上面的人造人」、「細胞培植」、「生物科技」、「人工智能」、「Machine Learning」。

這個星期內很多網友也希望能夠集齊七棵龍珠,希望許願鳥山明先生復活,但是這個世界真的沒有七龍珠,雖然沒有七龍珠,但是我希望有時光機,能夠把特效藥送到鳥山明先生的手上。再見鳥山明先生。





86Duino 連續匠 配合超強魔法
朋友介紹,今個月參加咗一年幾日既「白紙市集」,配合今個,今次復活節假期,係自從 2020 年 十九疫情之後,首次再參加既活動,當然要出盡全力。


為咗配合復活節,今次印咗超多兔仔,有大有細,有唔同顏色,如果工作室冇咗印匠或連續匠,應該完成唔到呢個計劃。

今次印咗差不多 900 隻兔仔,講真,印匠生產能力超穩定,尤其連續匠有自動切換列印平台功能,我只需要 set 好一次 gcode,佢就會不停幫我工作,咁先係用 Printer 旣原意 (呢度所講既 Printer 係包括埋 文件 Printer 既意思),試諗諗,如果文件 Printer 唔識自動上紙,印一份文件要逐張紙入,我諗係人都想 Xxxxx 。

去到現場,就係我使用魔法嘅時候啦,印出嚟嘅差不多900 隻兔仔 …..

去到最後只係大約剩返 140 隻,我諗呢次係歷史性以來走失最多兔仔嘅一次。
至於我用咗乜嘢特別嘅魔法,令到啲兔仔自動自覺跳咗去其他人嘅手上呢,呢度唔交代啦。
印匠 Slic3r 的平面功能
有用 3D Printer 的朋友,通常在最後在結束的最後一層如有是大平面的話,通常會在平面上留下了印頭走向的紋路,最近印既東西都有這個問題,於是研究了一下,怎樣可以消除紋路。

如果使用印匠的朋友可以使用 Slic3r 的 plug-in,當然這項功能應該也是 Slic3r 切片也有提供的,
分別有 rectilinear / concentric / hilbertcurve / archimedeanchords / octagramapiral 五種選項
rectilinear 格子平面


concentric 不規則平面


hilbertcurve 希爾伯特曲綫平面


archimedeanchords 同心圓形平面


octagramapiral 八角星形平面


最值得一試的 是最後三種類型的平面
hilbertcurve 希爾伯特曲線平面 像是消除平面紋路的最佳選擇,不斷在表面上像迷宮一樣走出平面,消除了大多不必要的紋路線。

另外兩種「archimedeanchords 同心圓形平面」及「octagramapiral 八角星形平面」也是非常有用處的平面修飾方法。例如以下三張照片



86Duino GunBear 第六彈
86Duino 的鋼彈熊作品真的非常不錯,對於喜歡製作科幻類模型,尤其鋼彈系列的,又想進入 3D 打印模型時代的,是一套非常好的入門作品。

對於這個系列的作品,我已經做到第六隻,但是其實在後面是做了很多台送給朋友,有些朋友是還在輪候中。


第六彈的渣古(白狼),是名乎其實的(黑、白、灰),在網上搜集資料時,白狼在外形上好像有兩種,一台是有長盾的,另一台是沒有長盾的,我選了沒有長盾的一台製作。原因是如果每一台渣古也一樣的話,實在太死板了。

The Gundam Bear Color
做着做着 86Duino 鋼彈熊系列,已經去到第三種配色,做這麽多台,其實只為一件事情,就是 86Duino 的線材配色真的可以很多元化,這次推出來的是 R-X86 G3 配色,應該之前是未有人做過的,主色選用 Simple Grey 簡約灰,配上 Denim Blue 牛仔藍。

R-X86 GunBear 已經有三隻了。下次不知道會是甚麼,但是事實上玩配色,是不會就這麼小的。

事實上配色世界𥚃有成千上萬的色彩,所謂顏色是永無止境的,只相差 1% 的灰階,就能夠變成另一種顏色了。

86Duino GunBear 大集合
做到痴線做到嘔血

86Duino 鋼彈熊系列的 Demo Kit Set 已經做到第四隻,今次做番好隻 C.A. 色,用櫻花系粉紅色配上一隻不知名的紅色,不知名的紅色也是 86Duino 的材料,因為是代理商的關係,好多時原廠做好一些新的顏色,也會寄給我小小試用一下,睇下顏色好不好,最後再由廠方決定可否生產。
一般來說廠房生產一種新的顏色印料,也是以噸位計算,聽説過有些廠商收到一些 Custom Made 的訂單,需要使用一整個貨櫃,但是 86Duino 也會接受客戶訂購原生顏色,大約只要訂購 20公斤左右,及給上 PANTONE 號碼,就可以為客戶生產,而我一直也在想,到底我需要甚麼顏色可以代表到我?

這次製作的 C.A. 版本,除了用上試版顏色,在盾牌上也改了檔案,把原本的十字星也刪除了,因為理論上 C.A. 不屬於 E.F.S.F。
3D Print 後加工

https://instagram.com/p/BrcED1_H2DG/
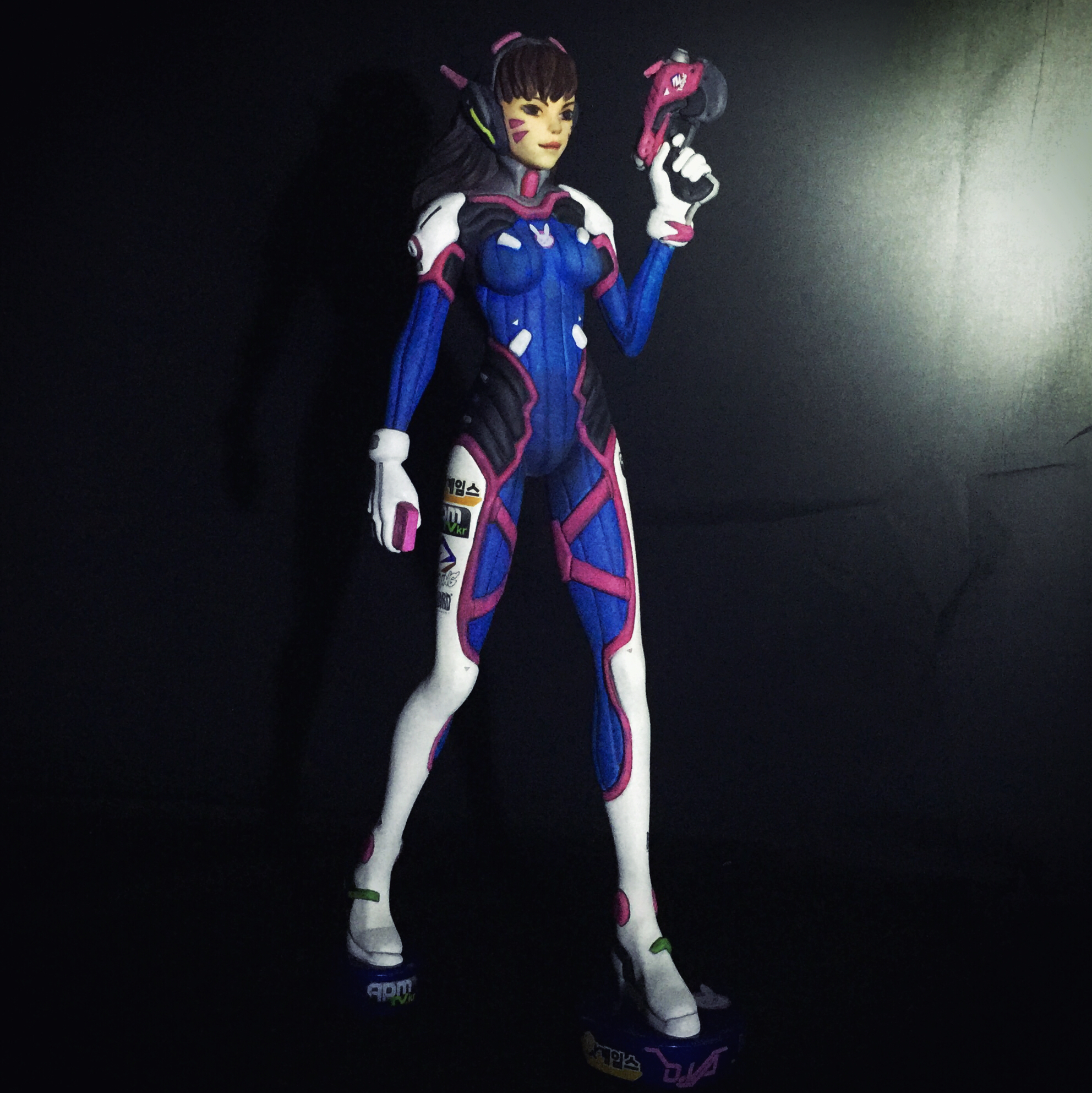
下載這個 Model 其實已有很久的時間,一直一直也沒有完成,是因為每次想做好她的時候,總會有些工作是插入來,最近總算完成了一個比較大型的項目,可以把剩下來的,比較不重要但又很重要的工作完成了,聽起來總覺得有些矛盾吧。
https://www.myminifactory.com/object/3d-print-overwatch-d-va-43953
Model 下載位置在 Mini Factory 內,這個 Model 其實已經下載咗差不多一年了。




最初印她出來的時候,印匠.続還沒有在,紅色的 T5 也還在,未出發到美國,所以真的很久了。
就這樣一直慢慢的加工,最後這星期終於完成了。









這樣才能叫合格
受朋友委託,要做一件小零件,收到以下這張圖片。

到底這是甚麼啦 =_= !
這不是很簡單的零件嗎?於是了解了一下,原來後面還有一個條件,零件是要不能小於 32.5克。
一個直徑 34mm 的圓型,圓心是 M4 的攻牙,高度暫不知道,重量不能小於 32.5克。
於是立刻用軟體先模擬一次重量,看看大約需要用甚麼物料,才可以達到要求。

如果是鋁材 6061 大約 11mm 厚度,大約重量是 33.181克,這應該可以,但朋友表示 11mm 高度太厚了,基本上用不到。
這難不到我的,鋁又不是重物料,只要加重物料,減小厚度便可以了,於是又用手上的鋼齒輪磅了一下重量。
 119.19 克,即是説要取走大約 四分三重量,而且又要把中間的 10mm 先燒焊孔封了,再變回 M4 攻牙,當然不會這樣做了。
119.19 克,即是説要取走大約 四分三重量,而且又要把中間的 10mm 先燒焊孔封了,再變回 M4 攻牙,當然不會這樣做了。
於是到五金舖買了件超廢鐵料。

先把兩邊多餘的切去,及先做一個 M3 孔,設定為圓心位置,方便 CNC 對準用。

先做好兩面平面,再以 CNC 把多餘的切走。

得出來的結果,36.25克。

結果接近了。
朋友說高度限制是需要在 5.8mm 以內,所以我希望是設定為 5mm 左右會比較好。而且還有 3.75克的空間可以給我減去,外形也不漂亮,刀具用的久了,應該有點花,而且工場內的平價 CNC 也用久了,已經達不到我的要求了,有空可能要整台拆散了,再好好修理保養一下。
於是這個時候出來的是「車床」「鑽床」,決定慢慢用手工法,希望能達到要求。



慢慢減,先鑽兩個 2mm 孔看看能減多少,這兩個孔有兩項功能,一是減重,二是能方便安裝使用,一般一個圓形,只得一顆螺絲位置是比較難安裝的,這些形狀的零件,通常會帶兩個小孔,方便插入鉗子安裝,或外帶凹槽或手扭花紋等,所以必須要有的。
最後粗加工,減到了 32.97克,這夠了嗎?還不夠啊,那個表面,太太太粗糙了,不夠漂亮啊,「沙紙」是時候出來了,先用 800 至 1000,再用 1200 至 2000,適度加工,最後再用 3000,當然如果夠時間,是還可以再更細緻點的,可以用到 5000 到 7000 沙紙打磨。但是我覺得夠了,就停下來了。下次如果再做的話,外形也可以再改進,現在還不是最漂亮最好的,反正是不完美。




最後,直徑是 33.43mm 厚度 5.01mm 重量 32.63克。外形帶亮面,當然還是有點花痕,所以說不夠完美。
說了這麼久,其實這件是甚麼啦 =_=#
這件其實是 Gimbal Stabilizer 機尾的 CounterWeight,朋友原本的遺失了,只好再做一個,我也沒有搜索過,到底這件小東西有沒有可以買到,但是收到這個課題,似乎很有挑戰性,於是便試一下了。


題外話:
話說香港很多學校在做 STEAM 教育,大多老師家長認為寫到一句程式便是 STEAM,3D 打印到一件東西就是 STEAM,想想,其實上面這一條朋友給我的題目,可能就是 STEAM 不可多得的題材,是要自己去找出答案來的,看似一件很簡單的零件,包括了:形狀、功能、計算、材料、製作、美學,這可能比同學們學打印一件東西、寫一句程式,還要有趣。設計機械人做久了,有時候需要放鬆一下,學習多點事情,才能再更進步,我很怕有大部分的人,以為寫到一句好程式就可以製作到一部好的機械人,以為是格鬥冠軍就很厲害,但是教學生學習製作機械人,其實是希望他們能從中學習,因為這其實還包括了一層更深的理論在內,感受到了,自然就能明白「其實我還很渺小」這道理。
86Duino GunBear 第二彈

上次講到,學習用 3D Print,也需要學習後加工技術,原因是 3D Print 之所以出現,其實是為了帶來第一個製品 樣辦。
86Duino 原廠設計出來的鋼彈熊 GunBear,正好給我用作製作原廠 Demo Unit Kit 使用,設計漂亮,而且做出來更是「型」,加上後加工技,真的可以玩很久。

今次這兩隻鋼彈熊仔推出以來,其實我已經做了十多隻,而且之前的已經全部送去朋友手上,再回來做給自己的 Demo Unit,將會全部貼上水貼,另原本精彩的印匠の糸的顏色,再升至另一層次。
而這次給自己的 R-X86 眼部是作出修改,原作 Gundam RX78 眼睛下是有紅色眼線的,所以就向原廠找回 STP 檔案,放入 Inventor 內重新修改,把原本眼睛的孔洞及曲面修補,重新編排眼睛位置及加回新孔洞,再在曲面上加回紅色部份刻線。
這次除了運用後加工,前期檔案也一同加工了。



3D Print 的後加工技術 86Duino Enjoy 3DP

賣 3D Printer 已經剛好有兩年時間,而且仲係代理 #台灣名品牌 #86Duino 的 #印匠,用得好賣得好是很簡單的道理,經我自己手賣出去的實在已經數唔到,但是有很多朋友/客戶會帶給我不一樣的驚喜,各行各業,使用 3D Printer 的人們也越來越多,接觸不同行業的設計師也越來越多,互相交流吸收經驗。
但是要賣得更好,隨了 3DP 還可以做怎麼呢?3DP 技術又多,FDM、SLA、SLS 技術多,材料多,思考呢個問題同時閃過一個念頭,3DP 本來就是要做些樣辦給客戶的第一件試作品,排除工業機械零件的單色,其他大多也是要代替從前的首辦,通常也要有色有細節的,那只要知道如何後加工便可以了,這時候模型技,應該可以幫上忙,於是想出這計劃,一整套的 86Duino 的 GunBear 計劃,3DP 後以 #印匠の糸 的原色,再加上後加工處理,應該可幫人解決不小問題。
所以這次先做出 MS-86 GunBear 綠渣,成為 Demo Unit 樣辦一號。


 BloodKeith FaceBook
BloodKeith FaceBook BloodKeith iTunes
BloodKeith iTunes BloodKeith YouTube
BloodKeith YouTube PLASTIC PALS
PLASTIC PALS Robofun 機械人論壇
Robofun 機械人論壇 Robosavvy
Robosavvy Criadobot
Criadobot dynamizer
dynamizer MARU Family
MARU Family Ostrogoto0101
Ostrogoto0101 Pacess Laboratory
Pacess Laboratory ProjectAutoWalker
ProjectAutoWalker Rayrider design
Rayrider design Robot TK02
Robot TK02 Robot TK03
Robot TK03 Robot TK04
Robot TK04 Robot TK05
Robot TK05 Tri Robot
Tri Robot